Lecture 07 Real-time Global Illumination (in 3D)
实时渲染中全局光照一般只bounce两次(直接光照bounce一次,间接光照bounce两次)
-
primary light source 真正的光源
-
secondary light source 次级光源:
一切被直接光照照到的物体都会继续将自己作为光源
-
想要用间接光照照亮\(p\)点,需要知道什么?
-
哪些是次级光源(或者说哪些物体表面会被直接光照照到)
- 可以通过Shadow Map来回答
-
点\(p\)接收到各次级光源的贡献是多少?
-
每个次级光源的物体表面反射出的光有一个radiance和area 范围
也就是要解一个Area light的渲染方程
-
-
Reflective Shadow Maps (RSM)
-
次级光源的表达形式
Shadow Map可以完美解决第一个问题,如果有一个Area light,可以用soft shadow mapping来得到不同的点的入射光强度
Shadow Map中的每一个texel可以认为是场景中的一个小片,那么对于一个\(m\times n\) 的shadow map,自然可以认为是有\(m\times n\)个次级光源,也就是要计算用\(m\times n\)个次级光源照亮点\(p\)
虽然计算量太大,但是shadow map给了我们一个场景中次级光源的离散表达方式
-
次级光源对点\(p\) shading时的方向
要计算点\(p\)接收到次级光源的radiance,实际上是从点\(p\)出发观察,那么这个观察方向是不固定的,于是认为所有的reflector 反射物都是diffuse的(不是要求接收物点\(p\)是diffuse的),就无所谓观察方向了
至此知道了场景中哪些是次级光源,也知道了次级光源反射出的能量是多少,解决了问题一
RSM其实类似于一个光栅化版本的离线渲染中的Virtual Point Light,更广义的说,VPL属于Instance Radiosity 即时辐射度/实时辐射度
最早即时辐射度不是基于光线追踪,而VPL将即时辐射度和光线追踪结合得非常好
Recall: Light Measurements of Interest 辐射度量学
- Flux/Power:描述能量是多少
- Radiant Intensity: 描述一个单位立体角上对应的能量是多少
- Irradiance: 描述一个单位面积下对应的能量
- Radiance: 单位立体角单位面积上对应的能量
公式推导
先考虑一个patch贡献的光照,如果Area积分面积比较小,可以不用积分,直接乘上Area面积\(\Delta A\)(黎曼积分把一个区间划分得足够小了之后,区间内的积分结果可以通过取区间中的某一个位置近似)
对于Diffuse的reflective patch(上面公式中的\(q\)点)
-
BRDF项: \(f_r=\rho/\pi\),\(\rho\)是albedo
-
Light项: \(L_i=f_r\cdot \frac{\Phi}{dA}\),\(\Phi\)是incident flux,由光源决定
BRDF的定义:出射的Radiance除以入射的Irradiance,Irradiance等于flux除以面积
这样的好处是将积分中的\(dA\)消掉了
对于reflector,它的BRDF项\(f_r\)是常数,而\(f_r\cdot\Phi\)是人们平常所说的reflected flux
那么对于shadow map中的一个texel,我们要求其\(L_i\),实际要的就是\(f_r\cdot\Phi\),这样甚至都不需要知道这个patch对应的大小是多少,因为\(L_i\)项和积分中的\(dA\)消了
所以每个texel只需存一个数就好(\(f_r\cdot\Phi\))
-
因此
\[E_p(x,n)=\Phi_p\frac{max\{0,<n_p\vert x-x_p>\} max\{0,<n\vert x_p-x>\}}{{\lvert\lvert x-x_p\rvert\rvert}^4}\\\Phi_p=f_r\cdot\Phi\ \\ 这里的x为shading\ point,x_p为次级光源,与渲染方程中的点相反\\ n和n_p为各自的法线\\ 算出的E_p没有考虑Visibility,对应渲染方程中的: L_i(q\rightarrow p)\frac{\cos\theta_p\cos\theta_q}{{\lvert\lvert q-p\rvert\rvert}^2}dA\\ \]- 分母为什么是四次方不是渲染方程中的平方?因为分子点乘没有normalize
如果考虑次级光源到shading point点\(p\)的可见性Visibility,又是一个\(n^2\)问题,不可能每个次级光源都生成一张shadow map,所以就不考虑可见性了
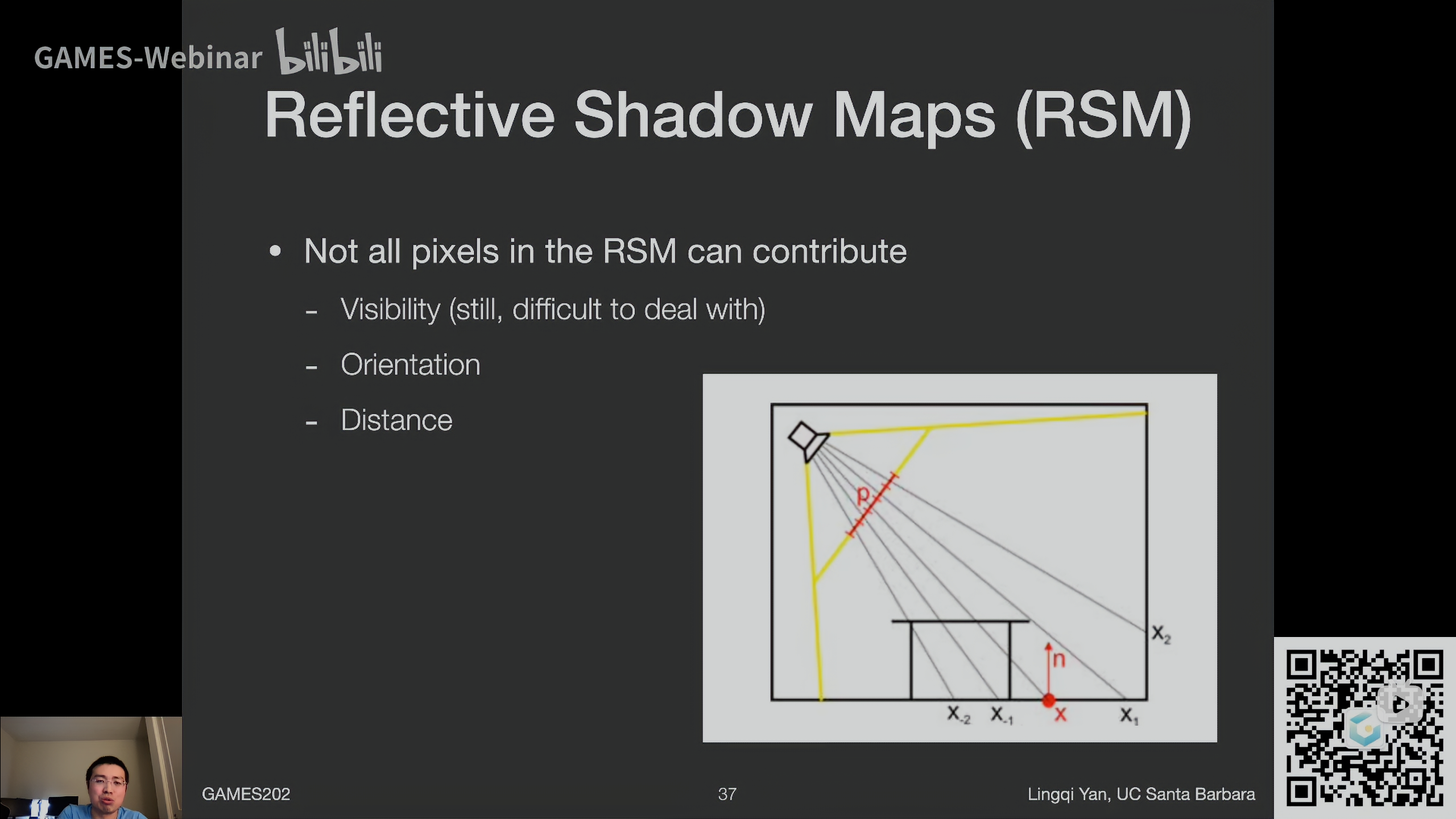
并非RSM中的每一个texel都对shading point有贡献
-
首先是Vibility的问题(但是很难算,所以不考虑了,并且间接光照不像直接光照那么高频,影响也不大)
-
方向上
比如\(x_{-1}\)对应的patch在桌面上,其法线与连线\(x_{-1}x\)夹角\(\cos\)值为负,说明照不到\(x\)点
这已经在渲染方程中体现了(\(E_p\)式中的分子上两项求夹角\(\cos\)值)
-
距离
本来经过一个距离平方,贡献就已经非常少了,那么给定一个shading point,只用找足够近的次级光源就OK了,于是就引出一个技巧
-
如何找离shading point近的次级光源?
在世界坐标下不好找,那么就将shading point投影到shadow map上,找周围的次级光源
(这里是一个比较大胆的假设,认为shadow map上离得比较近的点或深度接近的点在世界坐标下也接近)
-
为什么要这么做?
加速。
工业界的trick:
即便如此可能也会面临范围比较大的查询,可以根据离texel离shading point的距离决定哪些地方多采一点哪些地方少采一点(越近采样越密),采样少的地方说明将许多texel当成一个,权重应该要更大。这样做可以从原先\(512^2\)次查询降低至\(400\)(举例)
-
RSM中存什么
- 深度
- 世界坐标(世界坐标可以通过深度重建出来,这里是空间换时间)
- 法线(算\(\cos\)项)
- flux(跟光源相关的属性)
- 等等
RSM的应用
- 比如手电筒,因为手电筒覆盖的范围比较小,这样RSM的分辨率可以比较低
优缺点
-
优点
-
容易实现,就是Shadow Map的流程
第一个Pass生成RSM,第二个Pass shading
-
-
缺点
-
性能跟光源数量线性相关
有多少光源就得做多少个RSM
-
没有考虑间接光照的Visibility
-
很多假设:
- 假设reflector是diffuse的
- 将Shadow Map上的距离能一定程度反映出实际的距离
-
采样率和质量之间的折衷
-
为什么RSM是3D空间的方法而不是图像空间的方法?
我们需要的RSM在第一趟Pass就已经生成完了,第二个bounce正常从camera渲染就能得到结果,所以其实RSM应该是一个图像空间的方法,但为什么还是归类为3D空间上的方法呢?
- 因为RSM方法不会受到camera pass是否可见造成的信息影响,换句话说就是理论上不存在一开始就记录不到而丢失信息的情况,这种情况是图像空间呈现的问题
- 后面的LPV是建立在RSM的基础上
Light Propagation Volumes (LPV)
-
Key problem
- 查询任何shading point来自四面八方的radiance
-
Key idea
-
Radiance沿直线传播,且不会改变
-
平方衰减?
平方衰减是因为能量在传播过程中面积不断增大,单位面积上intensity会平方衰减,这是另外一个概念
-
-
Key solution
- 使用一个3D grid网格分割场景,每个格子称为Voxel体素,光线沿体素传播
步骤
-
Generation
生成radiance点集(次级光源,同RSM)
- 找到被直接光照照到的表面
- 直接用RSM
-
Injection
将次级光源点Injection注入到三维网格中的网格中
- 工业界一般用三维纹理来记录grid
- 对每一个grid cell,找到其包含的次级光源
- 将其包含的次级光源各个朝向的radiance分别加起来(朝向可能各不相同),得到任意一个空间上的格子,它往四面八方的radiance的初始值是多少
- 将结果投影至2阶球谐函数(4个基函数)
-
Propagation
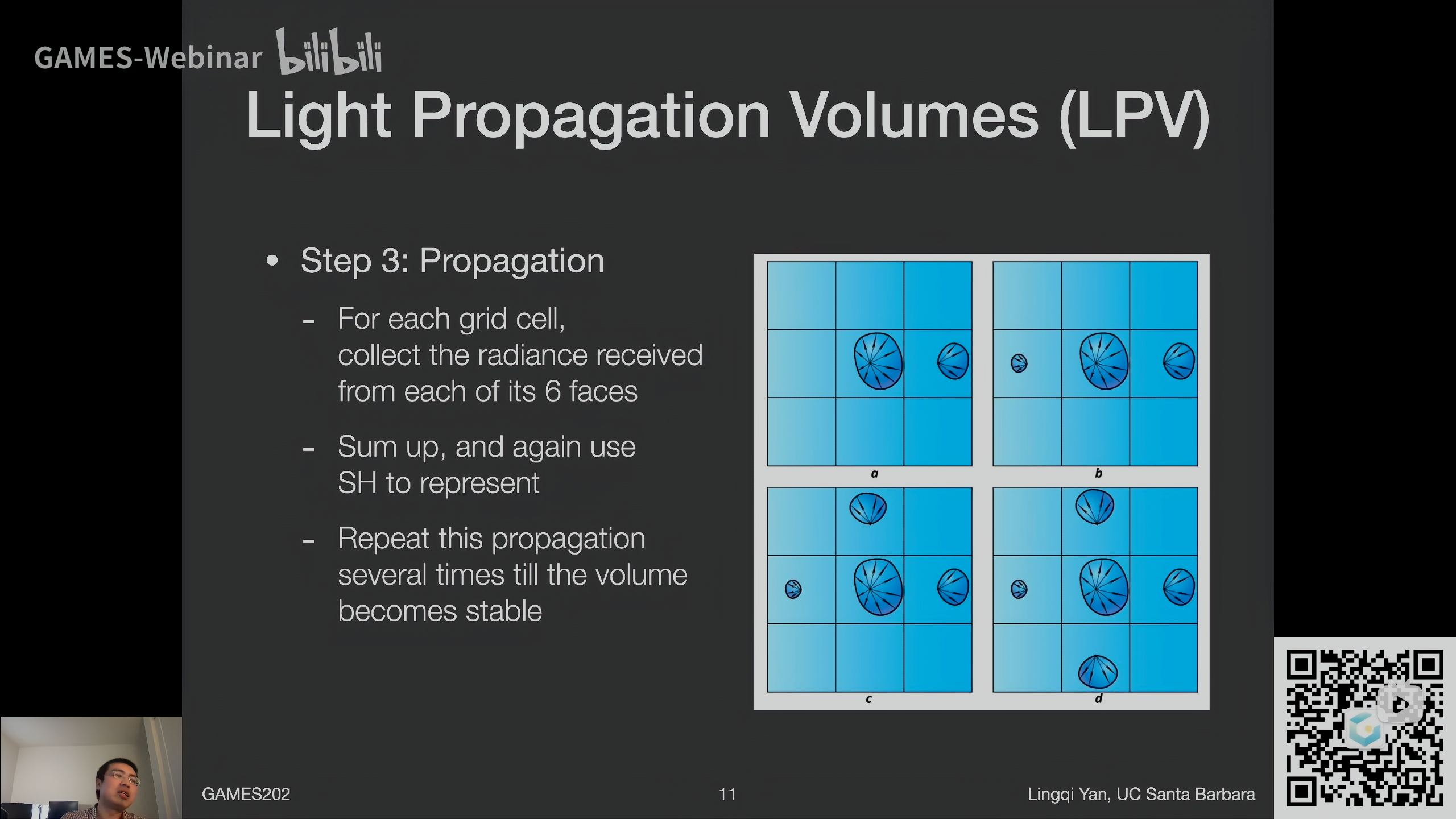
由第2步知道了radiance起点,就可以在三维网格中传播radiance,传播完成后,就知道了任意一个网格中的radiance是多少了
- 对于每个grid cell,收集来自周围6个面的radiance
- 将结果加起来,用球谐函数表示
- 重复若干次直到Volume变得稳定(一般迭代四五次即可)
-
Rendering
用最终得到的LPV来渲染
- 对于每个shading point,找到其所在grid
- 获取其接收到的所有方向上的incident radiance
- 渲染
问题
-
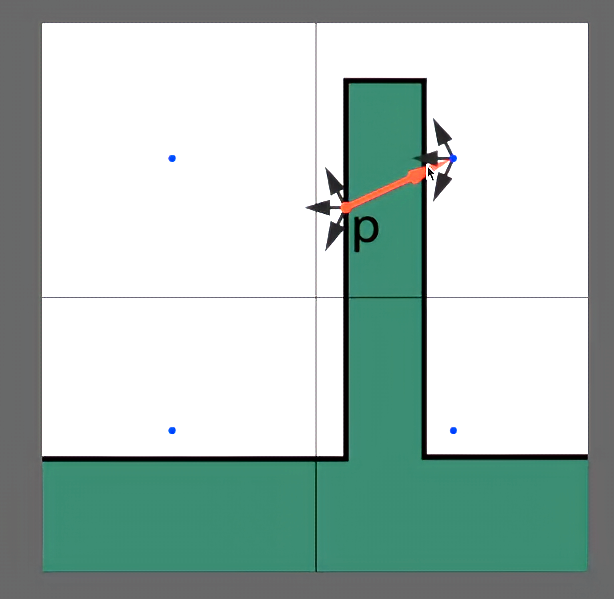
Light leaking
左边的p点接收到了直接光照,但p点反射出的radiance不应该反射到右侧墙体,这样导致了右侧墙体获得了错误的radiance
原因:Voxel的粒度比一个几何物体的粒度大,如果voxel划分地足够小可以避免这个问题(存储问题、propagation时传播的格子数也增多了)
-
Visibility
不考虑传播时,一个格子能够看到旁边的格子吗?
这里不考虑Visibility,否则计算量太大
-
斜对角的格子不考虑吗?
不考虑,假设有左下和右上两个斜对角的格子,右上的格子先传播到左边的格子,再传播到下面的格子,和直接斜对角传播一样
-
自适应分割
工业界会使用不同分辨率的格子来计算
-
格子多少合适?
一般比场景中的像素少一个数量级
-
传播过程一定会收敛达到一个稳态吗?
会,类比涟漪,没有施加外力,光线传播一定会达到稳态
-
烟雾里的传播
在烟雾里光线不沿直线传播
-
LPV并不是预计算的方法,而是实时的
-
球谐函数
因为使用SH来记录radiance,所以相当于只能处理diffuse情况,处理glossy情况会糊掉,相当于diffuse了
Voxel Global Illumination (VXGI)
-
VXGI也是一个two-pass的算法
-
与RSM的主要区别
-
RSM中次级光源是每个像素表示的微小表面,VXGI中场景完成离散化成体素
-
第二个pass从camera出发,打到任何一个像素上,根据这个像素的材质,如glossy材质
camera ray打到glossy材质会变成类似一个锥形往外反射,再根据锥形相交的体素,就知道这些体素的贡献了。对于每个像素都做一遍cone tracing
-
步骤
-
将场景体素化
-
创建hierarchy 层次结构
-
Pass 1 from the light
- 存储每个体素的incident light的分布,光源从哪些范围来,继承这样一个分布
- 存储法线的分布
- 更新在hierarchy
- 这样不同材质的shading point可以根据这些信息来计算,而不是想LPV一样认为每个voxel都是diffuse的
- 更高层级的voxel将低层级的voxel考虑在一块
-
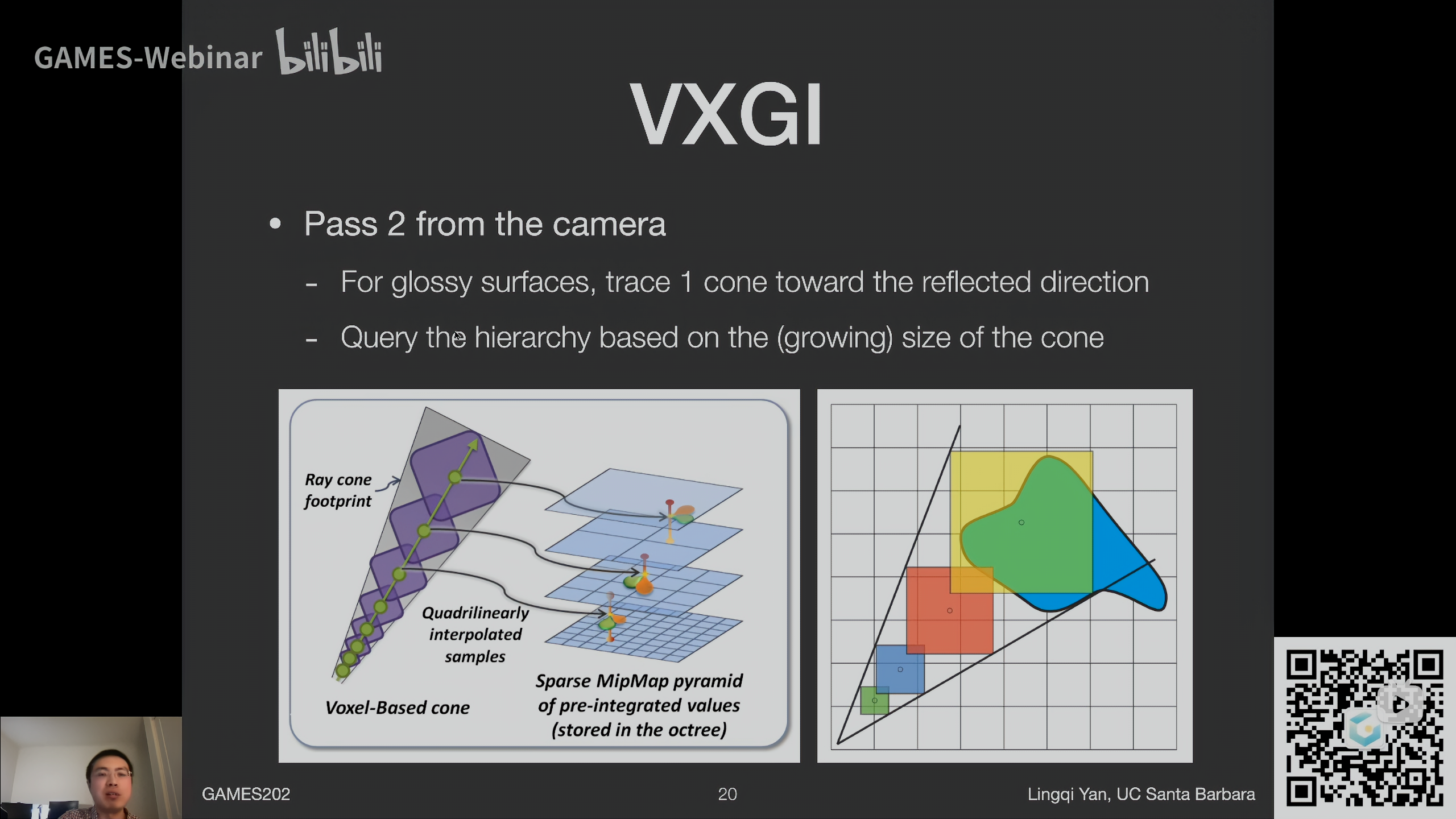
Pass 2 from the camera
-
从shading point出发连出一个锥,场景中所有voxel测试是否与锥相交,相交的话将该voxel的贡献算出来(这样太慢了!)
-
根据圆锥上一个点离初始点的距离算出来一个范围,然后在hierarchy上找对应的层级,这样可以省去每次都查最小的体素的时间
-
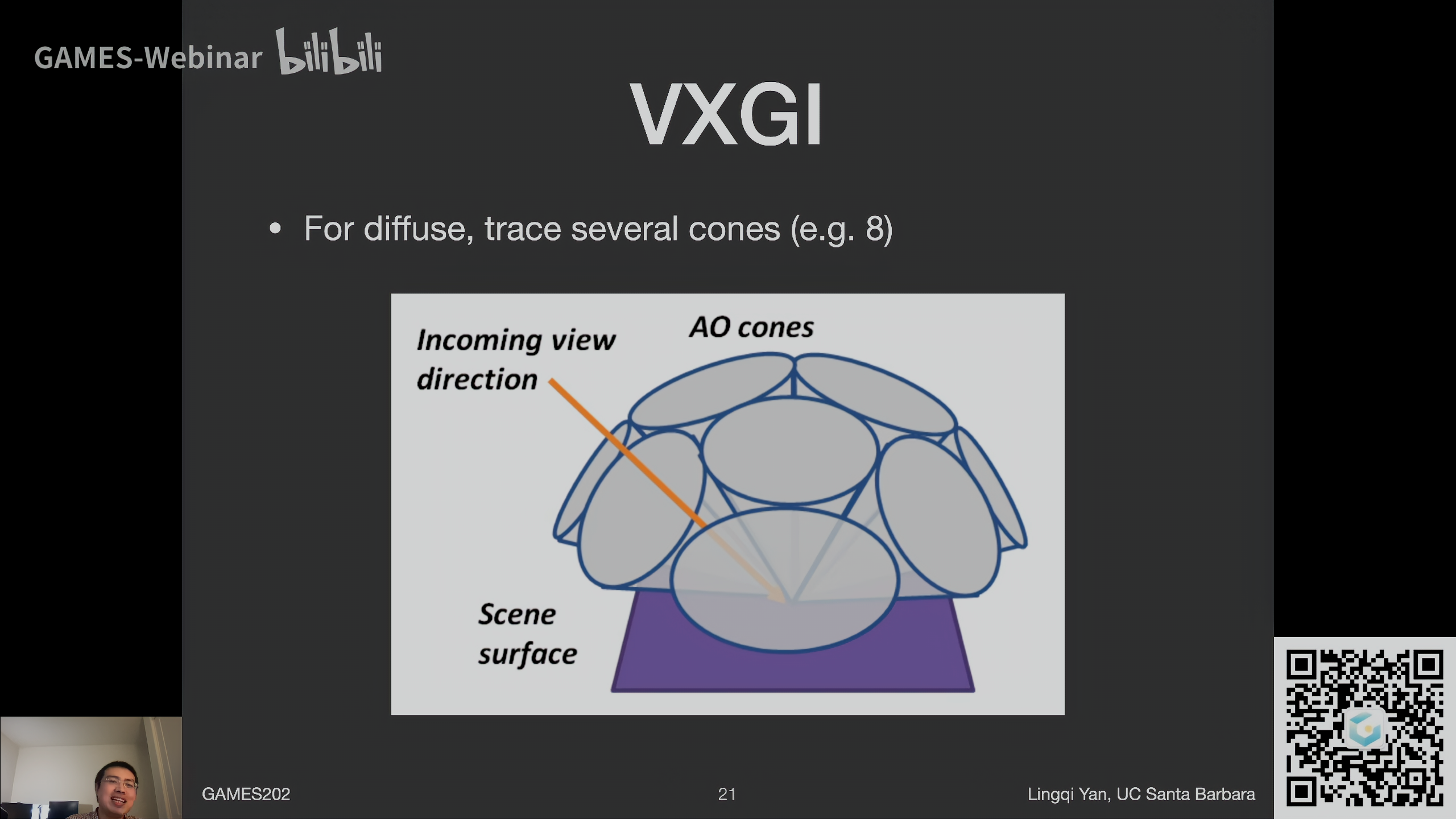
如果是diffuse,camera ray反射出的光线是一个半球,那不是场景中所有体素都被考虑进来了吗?
要考虑成一个超大号的圆锥(半球),不如考虑成若干个小圆锥
- 圆锥和圆锥之间会有缺口
- 圆锥和圆锥之间可能会有重叠
- 这些对于diffuse来说影响不大
-
对比LPV
LPV是先将场景中的次级光源传播到任何一个地方去,传播做一次
由于LPV用的格子,以及球谐函数表示,它不怎么准,但是会比较快
VXGI是将次级光源记录下来,并且记录成一个层次结构
shading point自己去找哪个次级光源能够贡献到它,代价是比较慢
LPV与VXGI
要将场景体素化是一件麻烦的事,通常需要预处理
如果是对于动态的场景,要实时体素化又会非常慢
LPV在现在的游戏中也还有应用,还有基于Probe 探针的方法
![[转]高斯-牛顿算法](https://img-blog.csdn.net/20160609002742523)