Real-time Shadows 1
Recap: shadow mapping
Shadow Mapping
- 2-Pass Algorithm
- The light pass generates the shadow map
- the camera pass uses the shadow map
- An image-space algorithm
- 好处:无需场景中的几何信息
- 坏处:导致自遮挡和走样问题
Pass
-
Pass 1: Render from light
- 从光源输出深度图
-
Pass 2: Render from Eye
-
从相机出发渲染
-
将实际相机看到的像素投影回光源看到的深度图(逆变换)记录的像素上,如果该点深度与光源记录的深度图中对应像素深度一致,则说明是同一个点,可以被看到,否则说明这个点是光源看不到的点,说明在阴影中
使用Z值或者离相机的实际距离都可以,但两次Pass要比较同一种值
-
Shadow Mapping中的问题
Self occlusion 自遮挡
-
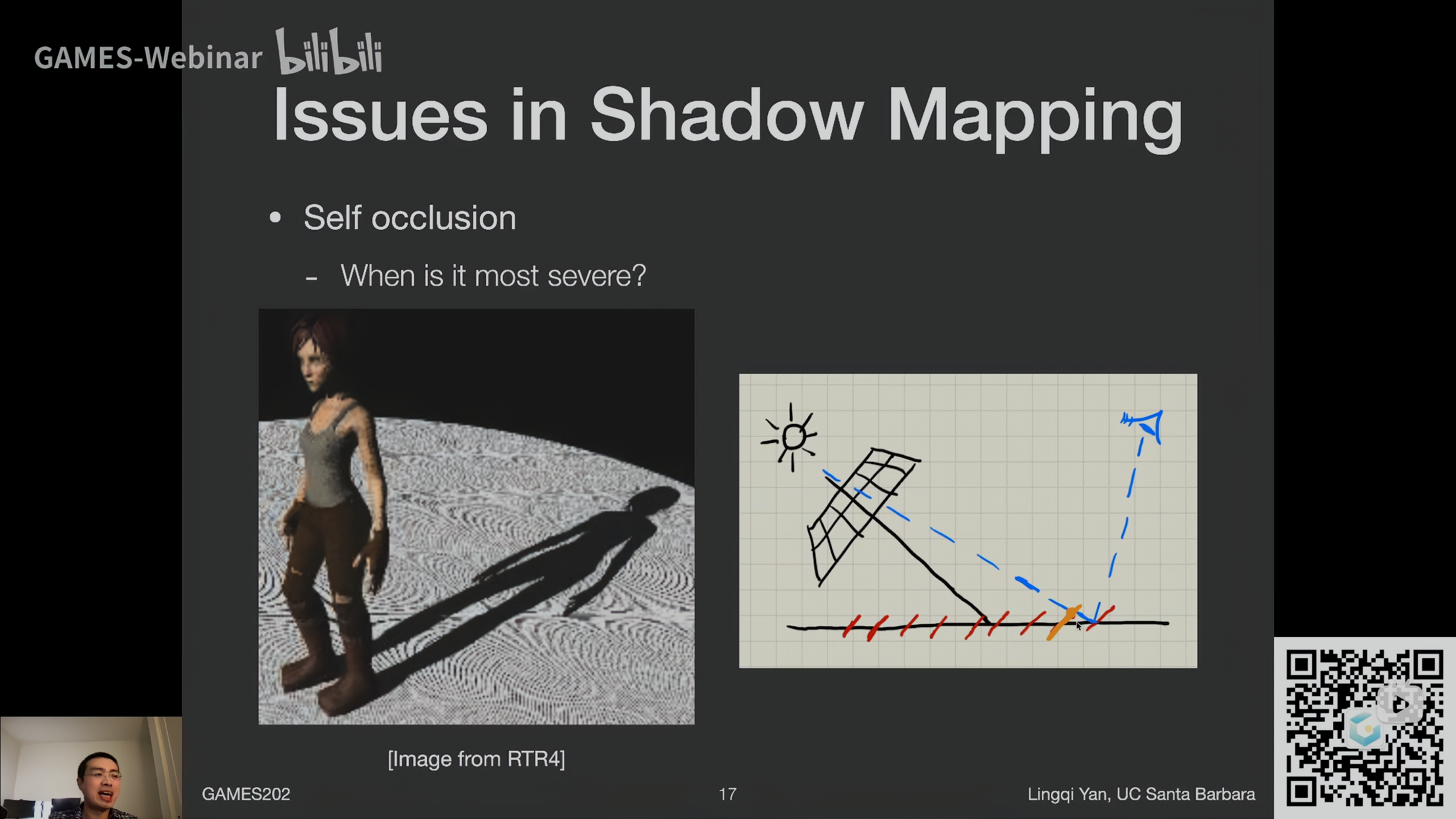
-
解决方法:
-
增加一个bias减轻自遮挡
bias过大,出现Peter Pan现象(detached shadow)
工业界几乎没有方法解决,只能找一个比较合适的bias
-
Second-depth shadow mapping
-
Shadow Map中存最小深度和第二小深度
-
使用最小深度和最二小深度的中值来做后续阴影比较
-
这样无需设定bias(相当于自适应bias)
-
工业界用的少
原因:
-
要求所有物体是watertight,即必须有正面反面,就算是一张纸,也得是很薄的一个物体
比如说“地板”不是一个watertight(解决方法,记录次浅深度为无限大)
-
输入的fragment是无序的,要始终保持最小和次小,要涉及到Swap,虽然时间复杂度仍然是\(O(n)\),能够实现,但是实时渲染不相信复杂度,只相信绝对的速度,因为实时渲染要求速度很苛刻,\(n\)和\(2n\)差异很大
-
-
-
Aliasing 走样
The math behind shadow mapping
微积分中的不等式
-
Schwaz施瓦茨不等式
\[[\int_a^bf(x)g(x)dx]^2\le\int_a^bf^2(x)dx\cdot\int_a^bg^2(x)dx \] -
Minkowski明可夫斯基不等式
\[\{\int_a^b[f(x)+g(x)]^2dx\}^{\frac{1}{2}} \le \{\int_a^b f^2(x)dx\}^{\frac{1}{2}} + \{\int_a^b g^2(x)dx\}^{\frac{1}{2}} \]
实时渲染中的重要约等式
这里将两个乘积的积分转化成了两个积分的乘积,右侧分母\(\int_{\Omega}dx(=\int_{\Omega}1dx)\)是归一化常数
以下条件满足任一可认为约等式成立
-
Small support(当积分域很小时)
-
point/directional lighting
点光源或方向光时,只有一个点有光照
-
-
Smooth integrand,g(x)在积分域内比较光滑
-
(diffuse bsdf / constant radiance area lighting)
如有一个面光源,面光源内部给出radiance不变,这样L就完完全全smooth了
在BRDF中,当BRDF是diffuse时,认为其变化非常小,当是glosssing,则不行
-
-
即使两项都不满足,也能强行用,如Ambient Occultation环境光遮蔽中
在Shadow Mapping中
于是在BRDF中,对于面光源或环境光照(环境光照可以理解为一个超大的面光源),Shadow Mapping是不准的
Percentage closer soft shadows (PCSS)
Soft shadows 软阴影:本影到没有阴影处的过渡
Percentage Closer Filtering (PCF)
PCF最早用于反走样(抗锯齿)
PCF的两点注意
- 不是对最后已经有阴影的地方进行Filter
- 如果是对Shadow Map做模糊,那阴影处和阴影外之间模糊的一圈毫无物理意义,且第二趟Pass和模糊了的Shadow Map做深度测试,得到的结果还是非0即1
PCF的工作原理:
普通Shadow Map是比较shading point变换到Shadow Map上对应点的深度,而PCF比较对应点周围一圈的深度(比如说\(7\times 7\)),将做完比较的结果平均(每次比较结果非0即1),得到一个visibility
PCF Filter的是任意一个shading point,做很多次阴影比较的结果
Filter size:
Filter size越大阴影越软。越小阴影越硬,那么是否各个不同的位置都要给一个相同大小的Filter size呢?
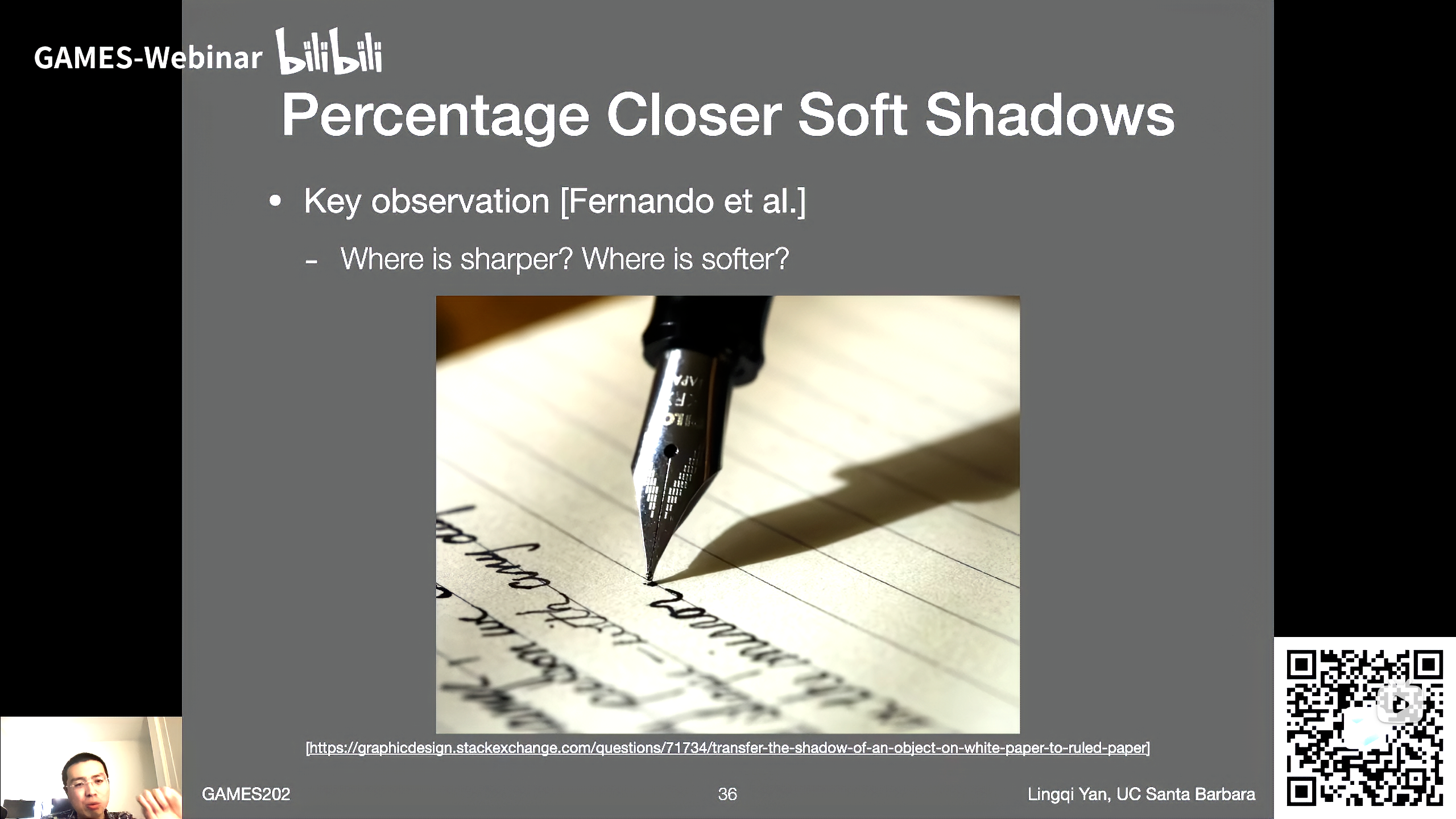
如图这里笔尖阴影非常锐利,几乎没有软阴影,而远处的阴影有软阴影
远近取决于shading point离投射阴影的point的距离(与遮挡物距离有关,与光源距离无关)
关键结论
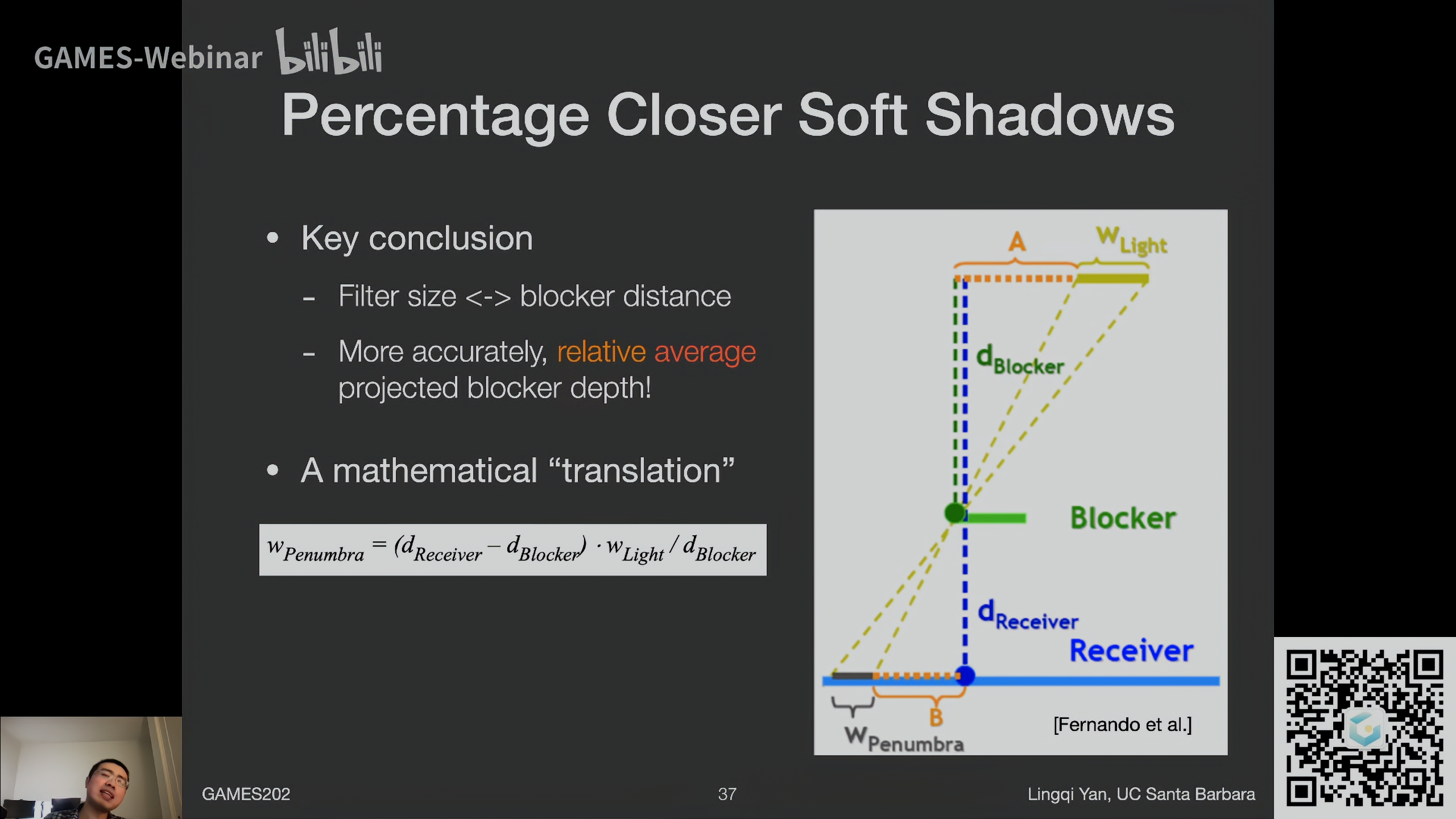
Filter size取决于遮挡物距离,更精确的说,与投射阴影的遮挡物的平均深度有关
根据相似三角形,可以得到半影范围与遮挡物距离的关系\(w_{Penumbra}=(d_{Receiver}-d_{Blocker})\cdot w_{Light}/d_{Blocker}\),这里\(w_{Penumbra}\)一定程度就可以表示阴影软的程度
*对于面光源,原本是无法生成Shadow Map的,一般做法是将其当成点光源处理,将相机放在面光源中心生成Shadow Map
PCSS
-
step 1: Blocker search
在特定范围内获得average blocker depth
取周围区域,判断在不在阴影里,将所有Blocker的深度取平均记录(不是Blocker不管)
-
step 2: Penumbra estimation
使用average blocker depth确定filter size
知道各处filter size多大,后续就跟PCF做法一样了
-
step 3: Pencertage Closer Filtering
要获得average blocker depth时,需确定在多大范围内比较
- 设为常量(如\(5\times5\))
-
- 取决于光源大小
- 以及shading point离光源的距离
Filter导致的开销问题?
多光源场景下如果使用Shadow Map,只能逐光源处理(延迟渲染不能解决阴影,延迟渲染解决光照)
点光源和平行光源本身就应该产生硬阴影
PCSS核心就是一个适应性的Filter size
![[转]高斯-牛顿算法](https://img-blog.csdn.net/20160609002742523)

![[转]OpenCV4.8 GPU版本CMake编译详细步骤 与CUDA代码演示](https://img2024.cnblogs.com/blog/494924/202409/494924-20240901123955342-1942084893.png)
![[图文直播]搭建Zfile私有网盘](https://img2023.cnblogs.com/blog/3485711/202409/3485711-20240901122652658-1117766162.png)