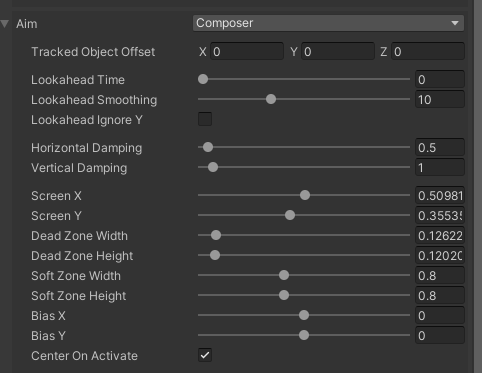
这个虚拟摄像机的瞄准算法会旋转摄像机,使其朝向指定的“注视”目标。同时,它还会应用偏移量、阻尼效果和构图规则。
主要要点:
朝向目标:摄像机会自动调整其方向,以面向指定的注视目标,例如角色的上脊椎或头骨、车辆,或通过程序控制或动画的虚拟对象。
偏移量:可以为摄像机设置偏移,使其在注视目标的基础上,调整位置,以获得更好的视角。
阻尼效果:摄像机的转动可以平滑过渡,避免突兀的视角变化,从而提升视觉体验。
构图规则:算法会考虑构图的原则,以确保画面美观,使目标在画面中的位置更为合理。
通过这种算法,虚拟摄像机能够智能地调整视角,提供更自然和流畅的视觉效果。
Tracked Object Offset
这是一个相对于注视目标中心的偏移量,使用的是目标的局部空间。这项设置可以帮助用户在跟踪目标时进行微调,以便更好地捕捉到所需的区域,而不是单纯地跟踪目标的中心。
主要要点:
局部空间偏移:这个偏移量是基于注视目标的局部坐标系进行定义的,使得设置更加直观。
微调跟踪位置:如果用户希望跟踪的区域不在被跟踪对象的中心位置,可以通过调整这个偏移量来实现。例如,用户可能希望注视角色的头部而不是整个身体中心。
灵活性:这种设置提供了灵活性,可以根据场景需求和拍摄角度进行精细调整,从而获得更理想的视觉效果。
通过使用这个偏移设置,用户可以更精确地控制摄像机的跟踪效果,使得画面更加符合预期。
Lookahead Time
根据注视目标的运动来调整偏移量。该算法会预测目标在未来几秒内的位置。这个功能对于动画中存在的噪声非常敏感,可能会放大噪声,导致摄像机出现不必要的抖动。
主要要点:
运动预测:算法会根据目标的当前运动状态,预测其在指定时间后的位置,从而调整摄像机的偏移量,以保持最佳视角。
噪声敏感性:如果目标的动画存在不规则的抖动或噪声,这项设置可能会使摄像机的抖动更加明显,影响视觉效果。
解决方法:如果摄像机在目标移动时出现不可接受的抖动,可以尝试降低这个属性的数值,或者使目标的动画更加平滑,以减少抖动现象。
通过合理调整这一设置,可以有效提升摄像机的稳定性,使得在目标运动时的视角切换更加自然流畅。
Lookahead Smoothing
控制预测算法的平滑度。较大的数值可以平滑抖动的预测结果,但同时会增加预测延迟。
主要要点:
平滑效果:增加这一数值可以减少预测结果的抖动,使得摄像机在跟踪目标时的表现更加稳定和自然。
预测延迟:然而,较高的平滑度也意味着摄像机对目标运动的响应会变得迟钝,可能导致摄像机在目标变化时反应不够灵敏。
权衡选择:用户需要根据具体需求进行权衡。如果场景中目标的运动较为平滑,适当增加平滑值可以提高视觉体验;但如果目标运动频繁或快速,可能需要降低平滑值以保持实时响应。
通过合理调整这一设置,用户可以在稳定性和实时性之间找到最佳平衡。
Lookahead Ignore Y
切换此选项可以忽略在Y轴方向上的移动,以进行预测计算。
Horizontal Damping
该设置控制摄像机在屏幕水平方向上跟随目标的灵敏度。数值越小,摄像机的响应越灵敏,能够快速旋转以保持目标在“死区”内;数值越大,则表示摄像机的响应较重,旋转较慢。
主要要点:
灵敏度调整:较小的数值会使摄像机迅速调整视角,以更好地追踪目标,特别是在目标快速移动时,能够更好地保持目标在视野内。
响应特性:较大的数值则会使摄像机的旋转更加缓慢、沉重,可能导致目标在快速移动时难以迅速跟上,影响视角的稳定性。
场景需求:用户可以根据具体场景的需求进行调整。如果需要更快速的跟随反应,可以选择较小的数值;而在一些需要稳定画面的场景中,可以选择较大的数值。
通过合理调整这一设置,用户能够控制摄像机的跟随效果,确保在不同情况下获得理想的视觉体验。
Vertical Damping
该设置控制摄像机在屏幕垂直方向上跟随目标的灵敏度。用户可以为垂直和水平方向设置不同的数值,以实现丰富多样的摄像机行为。
主要要点:
垂直灵敏度:该数值决定了摄像机在垂直方向上跟随目标的响应速度。较小的数值会使摄像机快速调整视角,保持目标在视野内;而较大的数值则会导致响应较慢,适合需要稳定画面的场景。
水平方向与垂直方向的差异:通过为垂直和水平方向设置不同的数值,用户可以创建多样化的摄像机行为。例如,您可以选择在水平方向上更灵敏,而在垂直方向上保持更慢的响应,以适应不同的拍摄需求。
丰富的效果:这种灵活性使得用户能够更好地控制摄像机的表现,以应对各种场景和动态,提升整体视觉体验。
通过合理调整垂直和水平设置,用户可以实现理想的摄像机跟随效果,以适应不同类型的游戏或动画场景。
Screen X
这是指“死区”中心的水平方向屏幕位置。摄像机会旋转,使得目标出现在这个位置。
主要要点:
死区概念:死区是指摄像机在一定范围内不对目标位置变化做出响应的区域。目标在这个区域内时,摄像机保持静止,直到目标移动到死区边缘。
水平中心位置:该设置定义了死区中心在屏幕上的水平位置。当目标位于这个位置时,摄像机会自动调整视角,使目标清晰可见。
灵活性:通过调整死区的中心位置,用户可以控制摄像机在跟随目标时的行为。例如,可以将中心位置设置在屏幕的左侧或右侧,以适应不同的视觉需求。
合理使用这个设置,可以提高摄像机的跟踪效果,使得目标在游戏或动画中的表现更加自然和流畅。
Screen Y
这是指目标在屏幕上的垂直位置。摄像机会旋转,使得目标出现在这个位置。
主要要点:
目标位置:该设置定义了目标在屏幕上的垂直位置。当目标位于这个位置时,摄像机会自动调整视角,确保目标清晰可见。
灵活性:通过调整这个垂直位置,用户可以控制摄像机在跟随目标时的行为,确保目标始终处于理想的视野位置。例如,可以将目标位置设置在屏幕的上方或下方,以适应不同的视觉需求。
优化视角:确保目标处于这个垂直位置有助于增强视觉体验,使得目标在游戏或动画中更为突出。
合理使用这一设置,可以提升摄像机的跟踪效果,确保目标在屏幕上始终保持在理想的位置。
Dead Zone Width
这是指摄像机在屏幕上忽略目标移动的区域宽度。如果目标位于这个区域内,虚拟摄像机将不会更新其旋转。这一设置非常有助于忽略小范围内的目标移动。
主要要点:
死区区域:该区域定义了一个“死区”,在这个区域内摄像机不做出响应。换句话说,当目标在这个区域内移动时,摄像机的视角不会发生变化。
避免小幅抖动:这个设置可以有效避免因目标的小幅移动而导致摄像机频繁调整视角,从而保持画面的稳定性。
增强视觉体验:通过忽略微小的目标移动,用户可以提高整体的视觉体验,尤其是在目标运动不规律或轻微抖动时,能够让画面看起来更为平滑。
合理设置这个区域的宽度,可以使摄像机的跟踪更加自然,避免不必要的视角变化。
Dead Zone Height
这是指摄像机在屏幕上忽略目标移动的区域高度。如果目标位于这个区域内,虚拟摄像机将不会更新其旋转。这一设置非常有助于忽略小范围内的目标移动。
主要要点:
死区区域:该区域定义了一个“死区”,在这个区域内摄像机不做出响应。也就是说,当目标在这个区域内上下移动时,摄像机的视角不会发生变化。
避免小幅抖动:通过设置这个区域的高度,可以有效避免因目标的小幅上下移动而导致摄像机频繁调整视角,从而保持画面的稳定性。
增强视觉体验:忽略微小的目标移动可以提高整体的视觉体验,尤其是在目标运动不规律或轻微抖动时,使得画面看起来更加平滑和自然。
合理设置这个区域的高度,可以使摄像机的跟踪效果更加自然,避免不必要的视角变化。
Soft Zone Width
这是指“软区”的宽度。如果目标出现在屏幕的这个区域内,摄像机会旋转将其推回到“死区”,而这个过程的时间由“水平阻尼”设置指定。
主要要点:
软区定义:软区是一个介于目标的“死区”和正常跟踪区域之间的区域。在这个区域内,摄像机会对目标进行调整,但不会立即进行剧烈的视角变化。
推回动作:当目标进入这个软区时,摄像机会开始旋转,逐渐将目标推回到死区,以保持画面的稳定性和一致性。
水平阻尼:这个设置决定了摄像机旋转的速度和缓和程度。较高的阻尼值会使摄像机的推回动作更加平滑,而较低的值则会使其反应更迅速。
通过合理设置软区的宽度和水平阻尼,用户可以实现更加自然的摄像机跟踪效果,提升整体视觉体验。
Soft Zone Height
这是指“软区”的高度。如果目标出现在屏幕的这个区域内,摄像机会旋转将其推回到“死区”,而这个过程的时间由“垂直阻尼”设置指定。
主要要点:
软区定义:软区是一个介于目标的“死区”和正常跟踪区域之间的区域。在这个区域内,摄像机会对目标进行调整,但不会立即做出剧烈的视角变化。
推回动作:当目标进入这个软区时,摄像机会开始旋转,逐渐将目标推回到死区,以保持画面的稳定性和一致性。
垂直阻尼:这个设置决定了摄像机旋转的速度和缓和程度。较高的阻尼值会使摄像机的推回动作更加平滑,而较低的值则会使其反应更迅速。
通过合理设置软区的高度和垂直阻尼,用户可以实现更加自然的摄像机跟踪效果,提升整体视觉体验。
Soft Zone Height
这是指“软区”的高度。如果目标出现在屏幕的这个区域内,摄像机会旋转将其推回到“死区”,而这个过程的时间由“垂直阻尼”设置指定。
主要要点:
软区定义:软区是一个介于目标的“死区”和正常跟踪区域之间的区域。在这个区域内,摄像机会对目标进行调整,但不会立即做出剧烈的视角变化。
推回动作:当目标进入这个软区时,摄像机会开始旋转,逐渐将目标推回到死区,以保持画面的稳定性和一致性。
垂直阻尼:这个设置决定了摄像机旋转的速度和缓和程度。较高的阻尼值会使摄像机的推回动作更加平滑,而较低的值则会使其反应更迅速。
通过合理设置软区的高度和垂直阻尼,用户可以实现更加自然的摄像机跟踪效果,提升整体视觉体验。
Bias X
这个设置用于确定软区在水平方向上的位置,相对于死区的位置。
主要要点:
软区定位:通过调整这个设置,用户可以控制软区在屏幕上的水平方向位置。软区是介于死区和正常跟踪区域之间的区域。
相对关系:软区的具体位置与死区的相对位置会影响摄像机对目标的跟踪行为。如果软区设置得较宽,摄像机会更灵活地调整视角;如果设置得较窄,摄像机对目标的反应会更迅速。
优化视角:合理定位软区可以帮助用户在不同场景中获得理想的视觉效果,确保目标在画面中的表现更加自然和流畅。
通过调整这个设置,用户可以有效管理摄像机的跟踪效果,使得画面呈现更加平衡和和谐。
Bias Y
这个设置用于确定软区在垂直方向上的位置,相对于死区的位置。
主要要点:
软区定位:通过调整这个设置,用户可以控制软区在屏幕上的垂直方向位置。软区是介于死区和正常跟踪区域之间的区域。
相对关系:软区的具体位置与死区的相对位置会影响摄像机对目标的跟踪行为。如果软区设置得较高或较低,摄像机会在目标进入这个区域时做出不同的调整。
优化视角:合理定位软区可以帮助用户在不同场景中获得理想的视觉效果,确保目标在画面中的表现更加自然和流畅。
通过调整这个设置,用户可以有效管理摄像机的跟踪效果,使得画面呈现更加平衡和和谐。
Center On Activate
当摄像机变为激活状态时,该设置会强制摄像机移动到屏幕的中心。
主要要点:
强制居中:一旦摄像机被激活,无论其之前的位置如何,都会自动调整到屏幕的中心位置。这可以确保观众始终关注到目标或关键内容。
提升一致性:通过将摄像机居中,可以提升视觉上的一致性,尤其是在切换摄像机时,避免因位置变化造成的视觉干扰。
适应性强:这种设置特别适合需要强调特定目标或场景的情况,使得摄像机的视角更加集中和稳定。
合理使用这个设置,可以有效改善用户的观看体验,使得内容的展示更加清晰和聚焦。