发现一个问题,tact合约如果代码都没有更改的情况下,不论怎么编译,合约地址都是同一个。
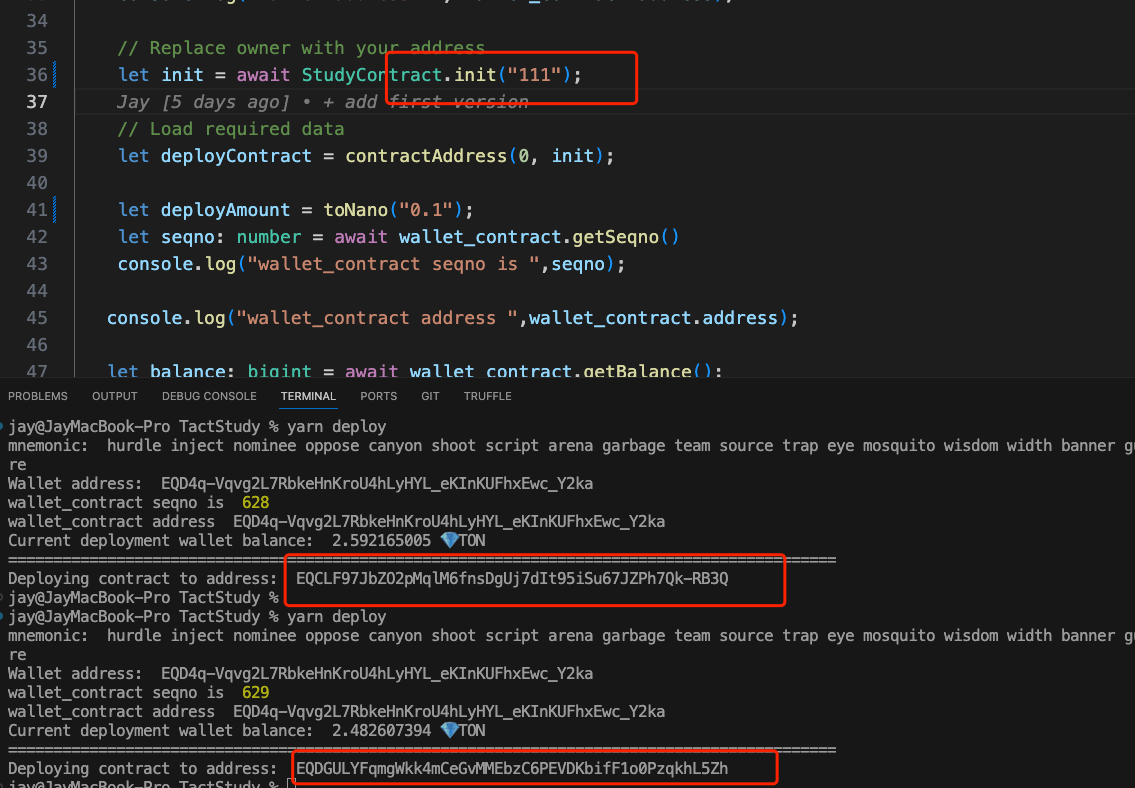
然后发现只要初始化的参数不一样就可以简单的生成不同的合约:
contract StudyContract with Deployable {msg: String = "123";// Constructorinit(msg: String){self.msg = "123"; // 初始化}ts代码初始化的时候只要参数不一样就可以生成不同的合约地址:
发现一个问题,tact合约如果代码都没有更改的情况下,不论怎么编译,合约地址都是同一个。
然后发现只要初始化的参数不一样就可以简单的生成不同的合约:
contract StudyContract with Deployable {msg: String = "123";// Constructorinit(msg: String){self.msg = "123"; // 初始化}ts代码初始化的时候只要参数不一样就可以生成不同的合约地址:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ryyt.cn/news/72710.html
如若内容造成侵权/违法违规/事实不符,请联系我们进行投诉反馈,一经查实,立即删除!