1、判断点云的点是否是有效的
pcl::PointXYZ p_valid;p_valid.x = 0;p_valid.y = 0;p_valid.z = 0;std::cout << "Is p_valid valid? " << pcl::isFinite(p_valid) << std::endl;// If any component is NaN, the point is not finite.pcl::PointXYZ p_invalid;p_invalid.x = std::numeric_limits<float>::quiet_NaN();p_invalid.y = 0;p_invalid.z = 0;std::cout << "Is p_invalid valid? " << pcl::isFinite(p_invalid) << std::endl;
打印结果:

2、复制同类的点云
// 拷贝点云pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());pcl::PointCloud<pcl::PointXYZ>::PointType p;// 相当于 pcl::PointXYZ p;p.x = 1;p.y = 2;p.z = 3;cloud->push_back(p);std::cout << p.x << " " << p.y << " " << p.z << std::endl;pcl::PointCloud<pcl::PointXYZ>::Ptr cloud2(new pcl::PointCloud<pcl::PointXYZ>());copyPointCloud(*cloud, *cloud2);// 相同类型复制pcl::PointCloud<pcl::PointXYZ>::PointType p_retrieved = (*cloud2)[0];//pcl::PointXYZ p_retrieved = cloud2->points.at(0);// 同上std::cout << p_retrieved.x << " " << p_retrieved.y << " " << p_retrieved.z << std::endl;
结果:

3、 类型不同的点云复制
// 拷贝点云pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());pcl::PointCloud<pcl::PointXYZ>::PointType p;// 相当于 pcl::PointXYZ p;p.x = 1;p.y = 2;p.z = 3;cloud->push_back(p);std::cout << p.x << " " << p.y << " " << p.z << std::endl;pcl::PointCloud<pcl::PointNormal>::Ptr cloud2(new pcl::PointCloud<pcl::PointNormal>());copyPointCloud(*cloud, *cloud2);// 不同类型复制,注意cloud2是包含点和法线的,若类型是pcl::Normal会报错//pcl::PointCloud<pcl::PointNormal>::PointType p_retrieved = (*cloud2)[0];pcl::PointNormal p_retrieved = cloud2->points.at(0);// 同上std::cout << p_retrieved.x << " " << p_retrieved.y << " " << p_retrieved.z << std::endl;std::cout << cloud2->points.at(0).x << " " << cloud2->points.at(0).y << " " << cloud2->points.at(0).z << std::endl;std::cout << cloud2->points.at(0).normal[0] << std::endl;std::cout << cloud2->points.at(0).normal_y << std::endl;std::cout << cloud2->points.at(0).normal[2] << std::endl;
结果:

4、获取导入点云文件的最大值和最小值点
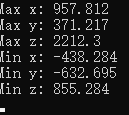
pcl::PointXYZ minPt, maxPt;pcl::getMinMax3D(*n.cloud, minPt, maxPt);std::cout << "Max x: " << maxPt.x << std::endl;std::cout << "Max y: " << maxPt.y << std::endl;std::cout << "Max z: " << maxPt.z << std::endl;std::cout << "Min x: " << minPt.x << std::endl;std::cout << "Min y: " << minPt.y << std::endl;std::cout << "Min z: " << minPt.z << std::endl;
结果:
另一种写法:
// 遍历点云区间for (const auto& p : n.cloud->points){if (minX > p.x) minX = p.x;if (minX > p.y) minY = p.y;if (minX > p.z) minZ = p.z;if (maxX < p.x) maxX = p.x;if (maxY < p.y) maxY = p.y;if (maxZ < p.z) maxZ = p.z;}qDebug() << minX << minY << minZ << maxX << maxY << maxZ;
结果:

导入的是同一个文件,但为什么结果不一样呢,因为这个没有做无效点判断,而上面那个底层是有判断的
5、组织有序的点云
// Setup the cloudusing PointType = pcl::PointXYZ;using CloudType = pcl::PointCloud<PointType>;CloudType::Ptr cloud(new CloudType);// Make the cloud a 10x10 gridcloud->height = 10;cloud->width = 10;cloud->is_dense = true;cloud->resize(cloud->height * cloud->width);// Output the (0,0) pointstd::cout << (*cloud)(0, 0) << std::endl;// Set the (0,0) pointPointType p; p.x = 1; p.y = 2; p.z = 3;(*cloud)(0, 0) = p;// Confirm that the point was setstd::cout << (*cloud)(0, 0) << std::endl;
结果:






