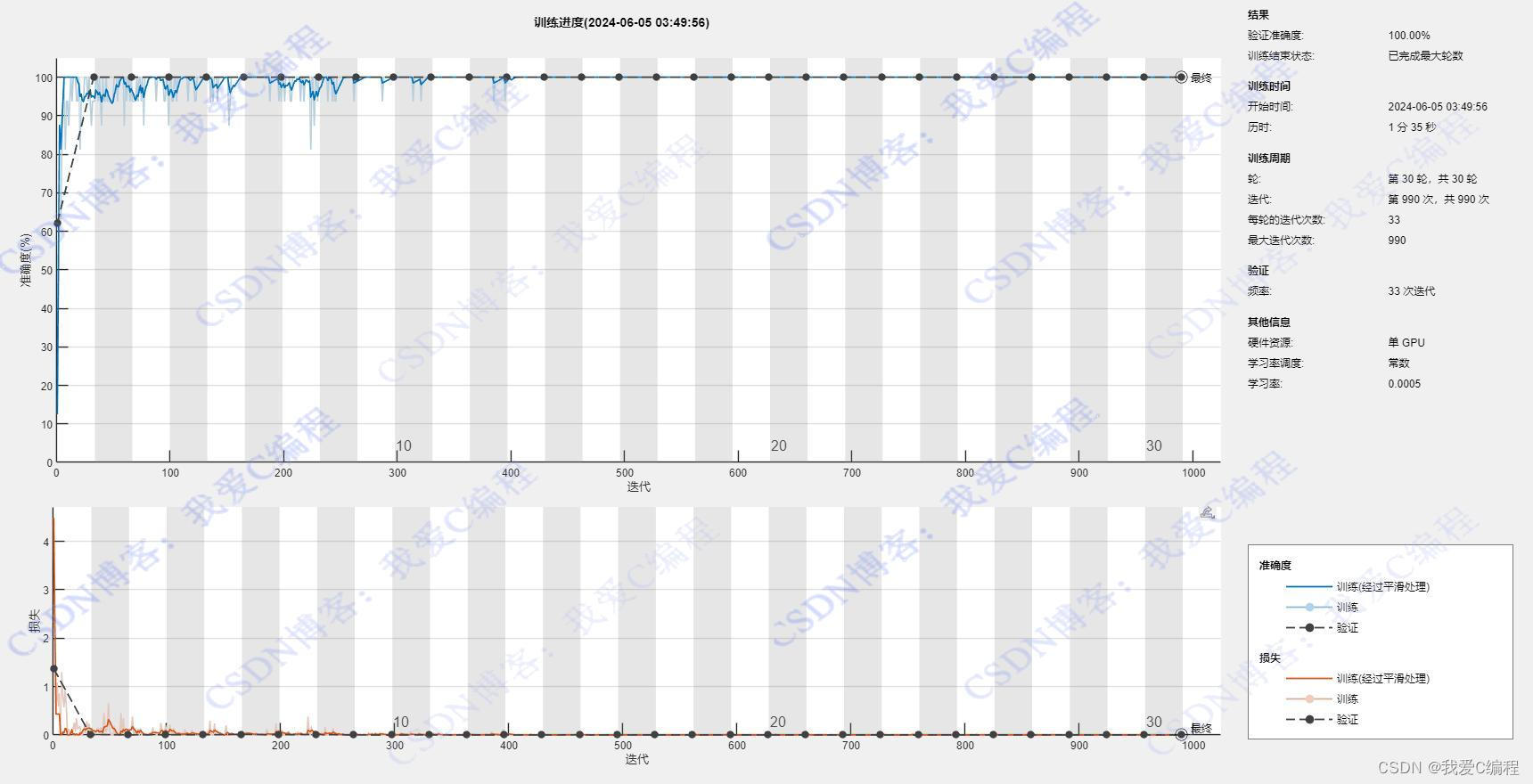
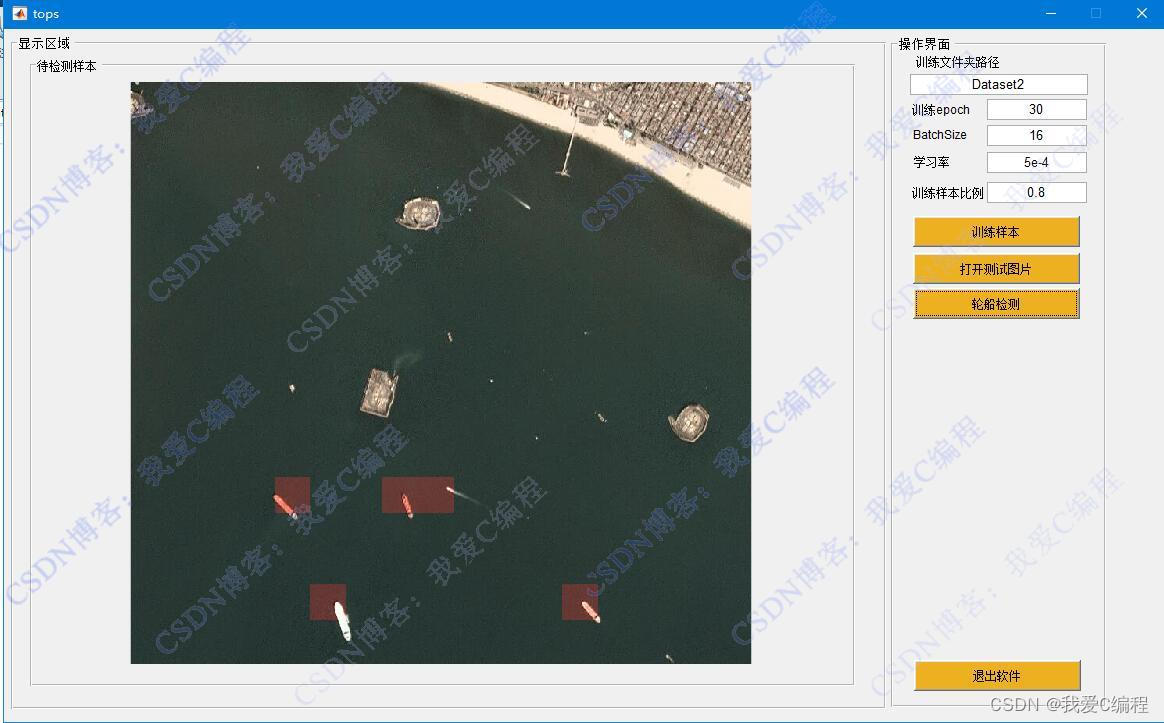
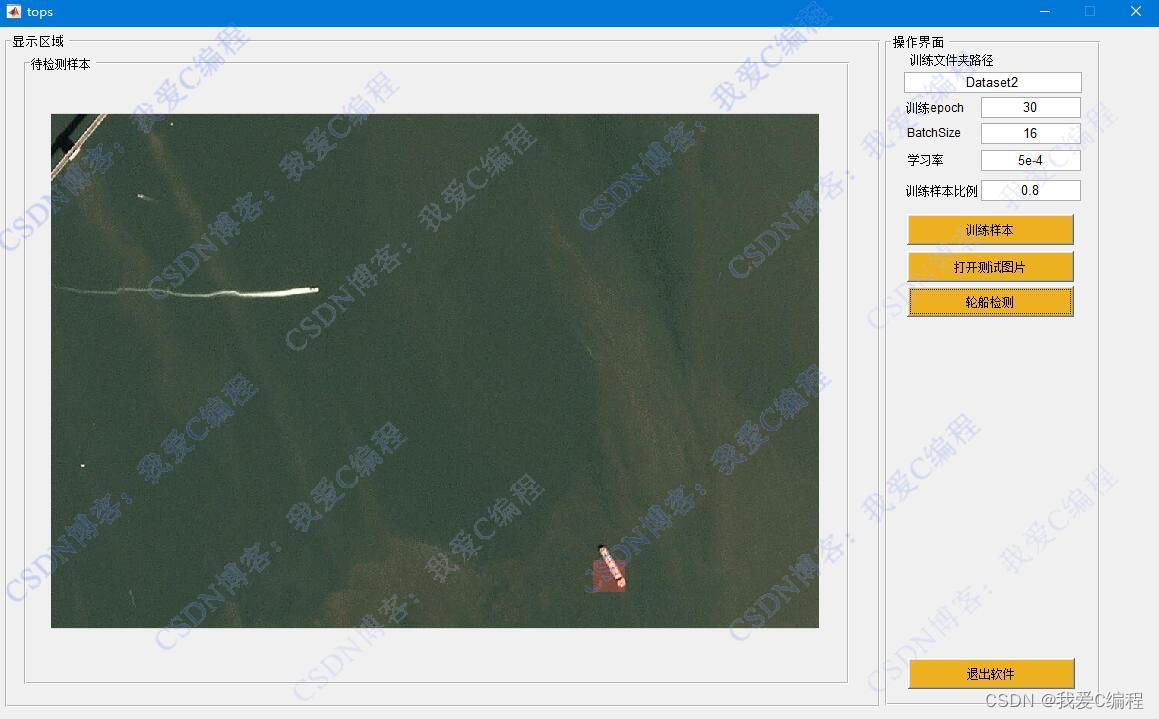
1.算法仿真效果
matlab2022a仿真结果如下:

2.算法涉及理论知识概要
在卫星遥感图像轮船检测中,常用的深度学习模型主要包括卷积神经网络(CNN)、循环神经网络(RNN)、以及两者的混合模型,但最常使用的还是基于CNN的模型,特别是那些在目标检测任务中表现出色的模型,如YOLO(You Only Look Once)、SSD(Single Shot MultiBox Detector)、以及Googlenet等。
基于GoogLeNet(也称为Inception网络)的卫星遥感图像轮船检测,是一种利用深度学习技术在复杂遥感场景中识别和定位轮船目标的先进方法。GoogLeNet以其独特的Inception结构闻名,这种结构设计旨在提升模型的深度和宽度,同时控制计算成本和过拟合风险。
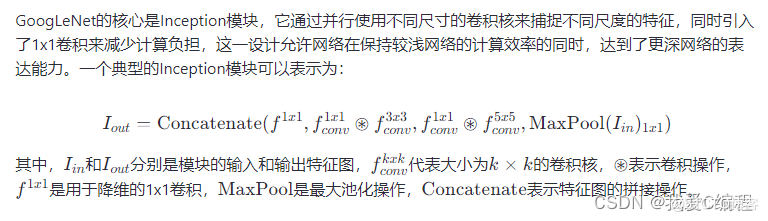
利用GoogLeNet的多层Inception模块,对输入的卫星遥感图像进行特征提取。在GoogLeNet的尾部,使用全局平均池化(Global Average Pooling, GAP)替换传统的全连接层,以减少参数数量并提高泛化能力:

基于GoogLeNet的卫星遥感图像轮船检测,通过深度网络的层次特征提取和高效的Inception模块设计,实现了对复杂海洋场景中轮船目标的有效识别和精确定位。结合精心设计的损失函数和训练策略,该方法在提高检测精度的同时,还能保持模型的计算效率,是现代遥感图像分析和海洋监测中不可或缺的技术之一。随着深度学习技术的不断演进,未来的研究将进一步优化模型结构,提升模型的泛化能力和实时处理能力,为海洋安全、环境保护等领域提供更多技术支持。
3.MATLAB核心程序
% [Predicted_Label, Probability] = classify(net, II); % imshow(im); % global CNT; global im; global Predicted_Label;load gnet.matimage2= im; [RR,CC,KK] = size(image2); LL = min(RR,CC);%图片划分大小 R = floor(LL/16); C = floor(LL/16); [W,H,k] = size(im);MASK = zeros(W,H); CNT = 0; for i = 1:floor(W/R)[i,floor(W/R)]for j = 1:floor(H/C)tmps = imresize(im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,:),[224,224]);[Predicted_Label, Probability] = classify(net, tmps); if double(Predicted_Label)==2image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1)=im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1)+60;image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2)=im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2);image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3)=im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3);CNT = CNT+1;elseimage2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1)=im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,1);image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2)=im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,2);image2(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3)=im(R*(i-1)+1:R*i,C*(j-1)+1:C*j,3);endend end imshow(image2); 0Y_027m




![[GodotDL C# D2]从空格控制转弯到撞墙检测](https://img2024.cnblogs.com/blog/2742820/202406/2742820-20240623225728351-272330132.gif)