动作编程功能是为了方便客户根据自己的应用场景,做到一个按键就连续做多个示波器操作,从而降低了对操作人员的技术要求,做到傻瓜式操作。之前LOTO有个类似的功能,是把示波器的基础设置根据不同的测试场景存成不同的设置文件,需要时可以选择合适的场景设置导入进来这个设置文件。它和动作编程(命令批处理)的区别是,设置文件是静态的,而动作编程时动态的。也就是说设置文件只能在导入这个设置的时刻,将所需要的设置实施一次;而动作编程可以让用户编辑按顺序逐步执行哪一个具体的功能操作,几乎可以代替人手点击操作的一系列动作序列。
如下图所示,动作编程功能属于LOTO示波器的非标功能,从非标功能按键弹出的功能导览窗口中选择动作编程:

我们会在功能页面看到对应的设置页面:
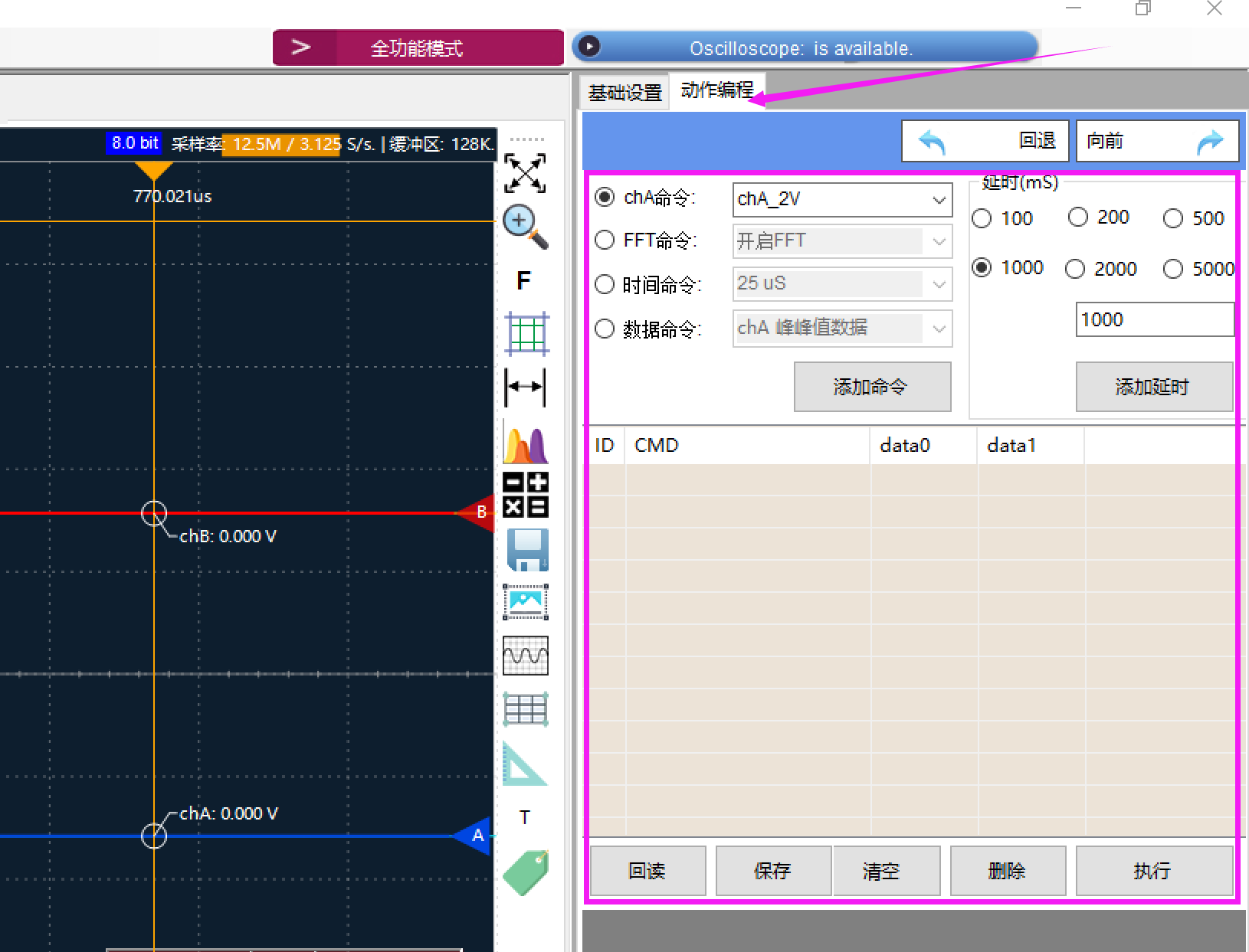
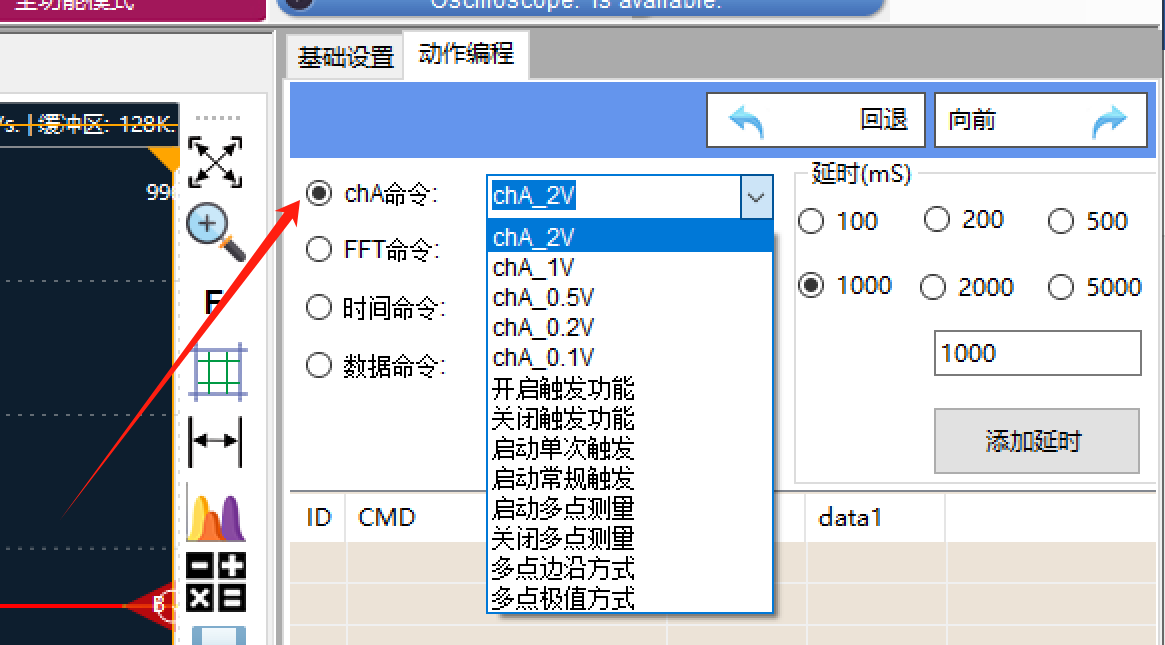
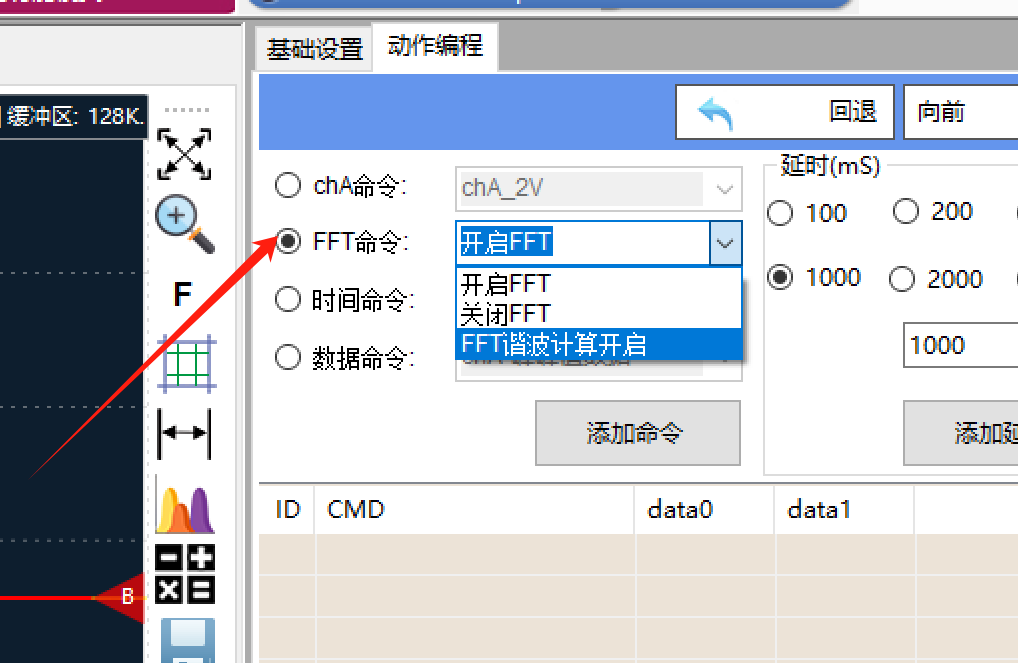
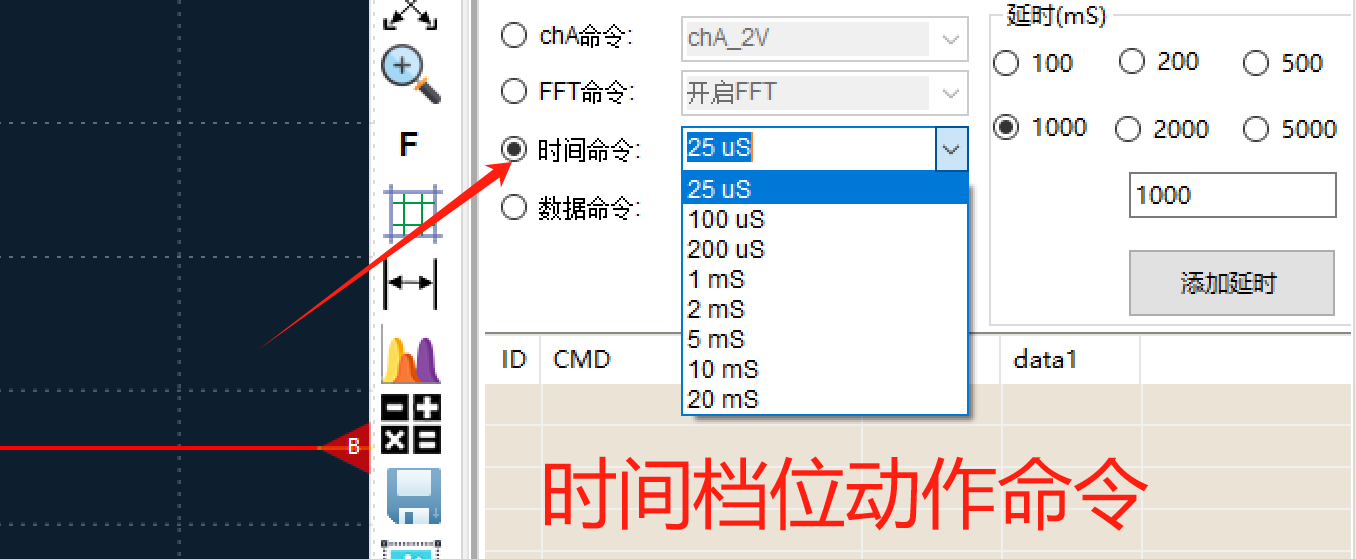
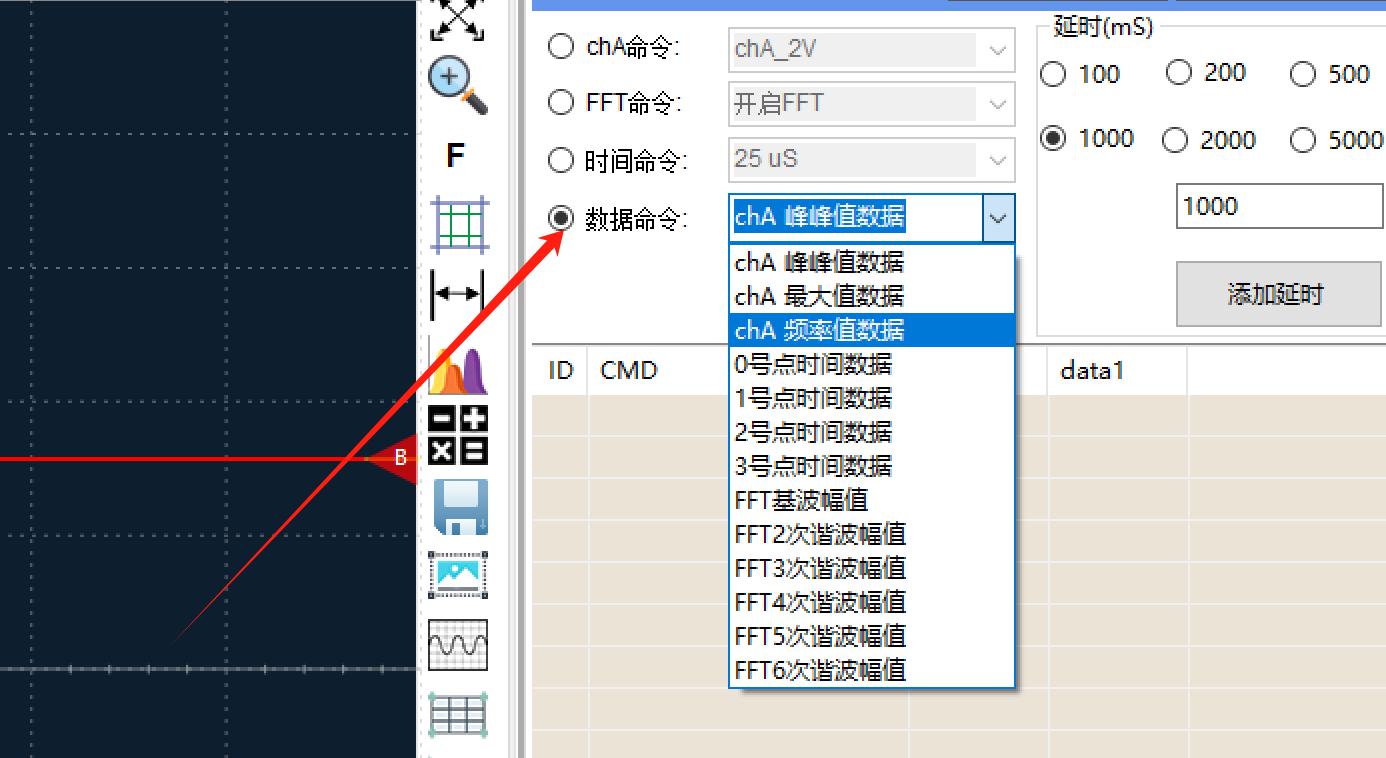
我们目前开放了一些客户常用到的动作命令,分类放在四个下拉列表里供选择,由于LOTO示波器功能较多,有客户需要没有开放到的其他动作命令,可以联系我们定制开放。目前大概分为通道A相关命令,FFT相关命令,时间相关命令,以及数据相关命令,如下图所示:

举例说明,我们可以做如下的命令数据组合:

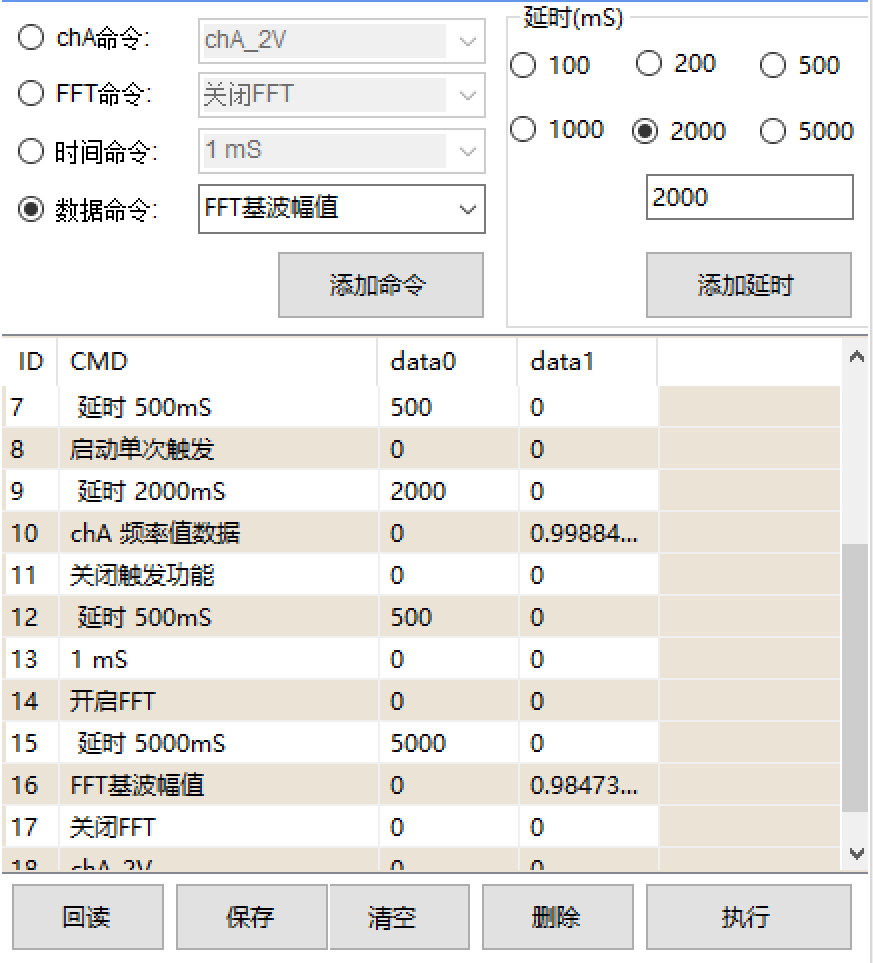
上图这个动作编程的列表可以点击保存,存在软件执行目录下。可以点击回读按钮恢复上次保存的动作序列。可以选中其中的一条命令点击删除,或者点击清空,删除所有的命令。如果需要在某一条命令处插入新的命令,可以点击它下面的一条,然后添加命令或者延时就可以了。
动作编程完毕以后,就可以点击执行按钮,LOTO示波器软件会按照这个动作编程的清单,逐一执行。如果是获取数据的命令,那么执行的时候获取到的数据会放在上图所示的data1列中对应的位置。
相关的操作我们录制了视频方便客户参考:《LOTO软件功能-命令批处理 自动化操作》
https://www.bilibili.com/video/BV1um411m7qt/?vd_source=c0bedc6c664e75d3c19935cbda8abe19